[模組] ESP32 C3 無線模組帶有 OLED 顯示
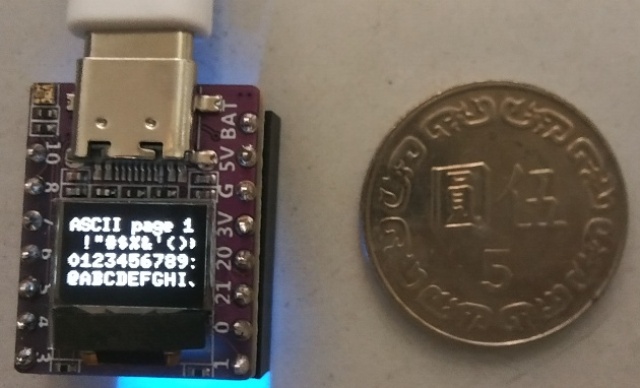
本周收到 ESP32C3 模組帶有 OLED 顯示模組,如下圖一所示,晶片的尺寸比一個銅板還小。ESP32 核心採用的是頻率 160MHz 的 RISC-V,我們從編譯過程就能看到 riscv32-gcc 的編譯工具,推斷內核是 RISC-V。之前,我常使用的 ESP32 內核晶片是 xtensa 核心,不過今年已經看到不少 MCU 核心改成 RISC-V 架構了,大概與中美科技對抗有關,參考先前的文章 "以 RISC-V 架構的 MCU" https://han-ya.blogspot.com/2022/05/risc-v-mcu.html 。這個無線模組上面的 SSD1306 OLED 尺寸是 0.42吋,72 x 40 點。 圖1-1:ESP32C3 模組正面圖 圖1-2:ESP32C3 模組背面圖 如何開發這個模組?很容易上手,只要在 Arduino IDE 上面就能編譯程式碼。首先,設定開發板的安裝網址 https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_dev_index.json,然後到 "開發板管理員" 下載安裝 ESP32 的套件,最後開發板的選項中,選 " ESP32C3 Dev Module "。 再來就是 OLED 模組的顯示,需要下載 u8g2 的函數庫,如下圖二,安裝到 IDE 環境裡。接著,到 github 網站下載程式碼 https://github.com/01Space/ESP32-C3-0.42LCD ,範例程式碼便能成功編譯了。 圖二:使用的 OLED 函數庫 題外話,近期市面上越來越多以 RISC-V 為架構的 MCU,可預期在中低端的成熟晶片將替換掉 ARM 架構,畢竟 ARM 架構需要授權金,RISC-V 目前是開放的架構,在成本上會比 ARM 架構更為有競爭力。